Generalized Small Object Detection: A Point-Prompted Paradigm and Benchmark
Haoran Zhu,
Wen Yang,
Guangyou Yang,
Chang Xu,
Ruixiang Zhang,
Fang Xu,
Haijian Zhang,
Gui-Song Xia,
School of Electronic Information, Wuhan University, Wuhan, China
Environmental Computational Science and Earth Observation Laboratory, EPFL, Sion, Switzerland
School of Artificial Intelligence, Wuhan University, Wuhan, 430072, China
[Paper]
[Code and Model]
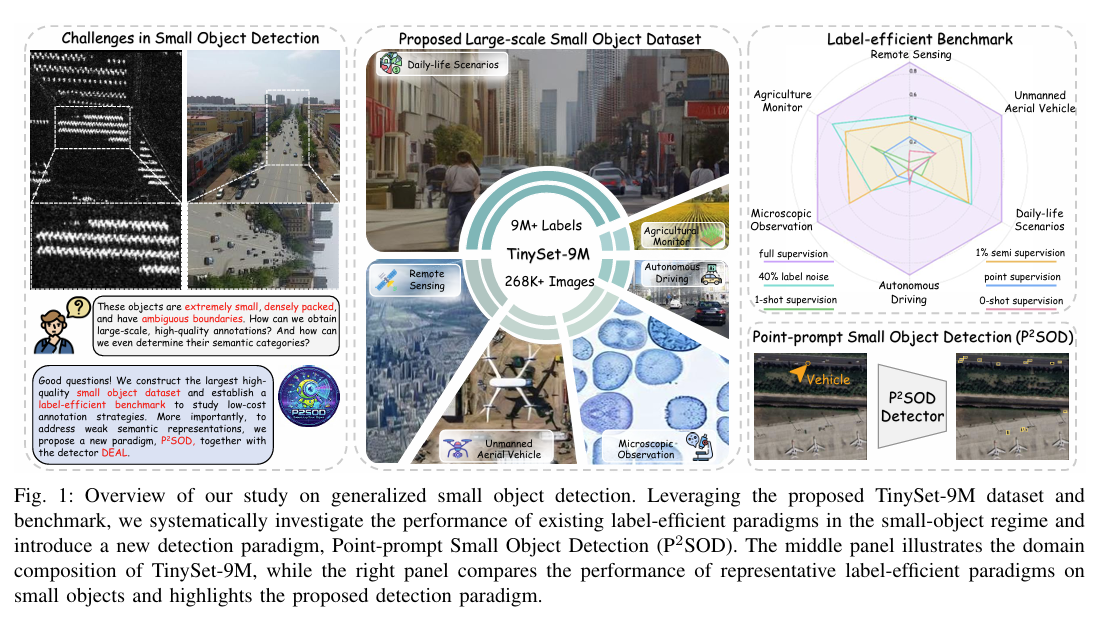
Figure 1. Overview of our study on generalized small object detection. Leveraging the proposed TinySet-9M dataset and
benchmark, we systematically investigate the performance of existing label-efficient paradigms in the small-object regime and
introduce a new detection paradigm, Point-prompt Small Object Detection (P2SOD). The middle panel illustrates the domain
composition of TinySet-9M, while the right panel compares the performance of representative label-efficient paradigms on
small objects and highlights the proposed detection paradigm.
|
Abstract
Small object detection (SOD) remains challenging due to extremely limited pixels and ambiguous object boundaries.
characteristics lead to challenging annotation, limited availability of large-scale high-quality datasets, and
inherently weak semantic representations for small objects.
In this work, we first address the data limitation by introducing TinySet-9M, the first large-scale, multi-domain dataset for small object detection.
Beyond filling the gap in large-scale datasets,
we establish a benchmark to evaluate the effectiveness of existing label-efficient detection methods for small objects.
Our evaluation reveals that weak visual cues further exacerbate the performance degradation of label-efficient methods in small object detection,
highlighting a critical challenge in label-efficient SOD.
Secondly, to tackle the limitation of insufficient semantic representation,
we move beyond training-time feature enhancement and propose a new paradigm termed Point-Prompt Small Object Detection (P2SOD).
This paradigm introduces sparse point prompts at inference time as an efficient information bridge for category-level localization,
enabling semantic augmentation.
Building upon the P2SOD paradigm and the large-scale TinySet-9M dataset, we further develop DEAL (DEtect Any smalL object),
a scalable and transferable point-prompted detection framework that learns robust, prompt-conditioned representations from large-scale data.
With only a single click at inference time, DEAL improves fully supervised baselines by 31.4% under strict localization metrics
(e.g., AP75) on TinySet-9M, while generalizing effectively to unseen categories and unseen datasets.
TinySet-9M
|
label-efficient benchmark
|
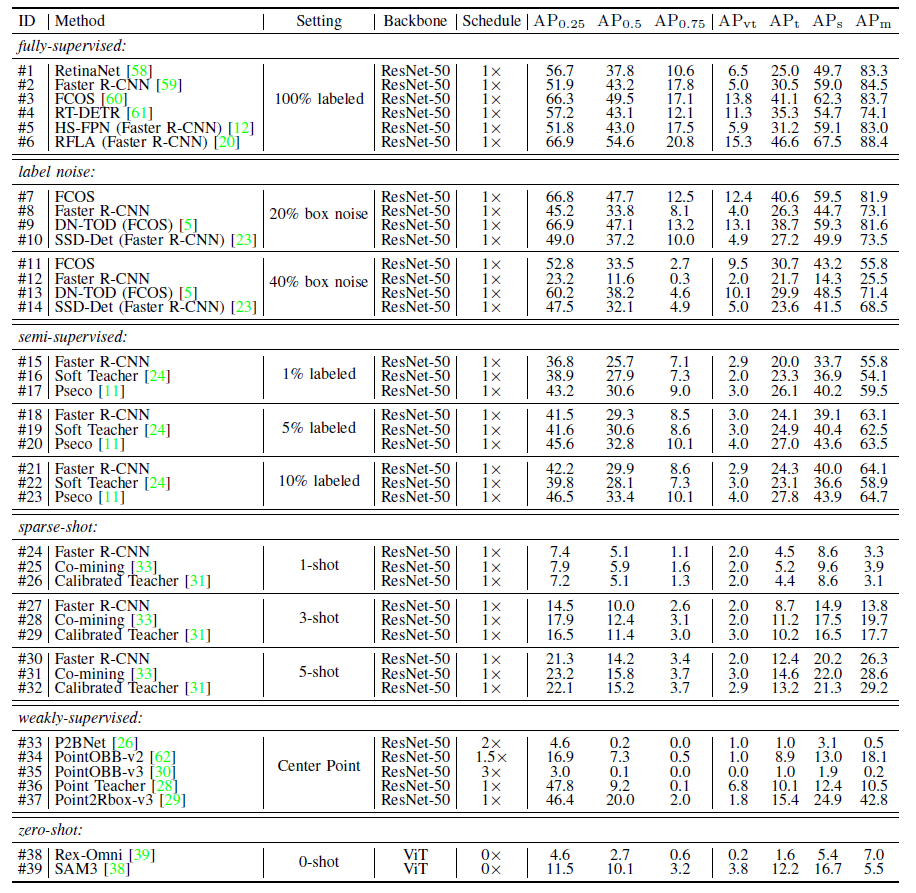
Figure 2. Main results of fully-supervised, noise-supervised, semi-supervised, sparse-annotated,
point-supervised, sparse-shot, and zero-shot methods on TinySet-9M (class-agnostic).
For the training schedule, 1x denotes 3 epochs.
All experiments are run on a computer with an NVIDIA RTX 3090 (24 GB) GPU. We use FP32 with 1024 x 1024 inputs.
|
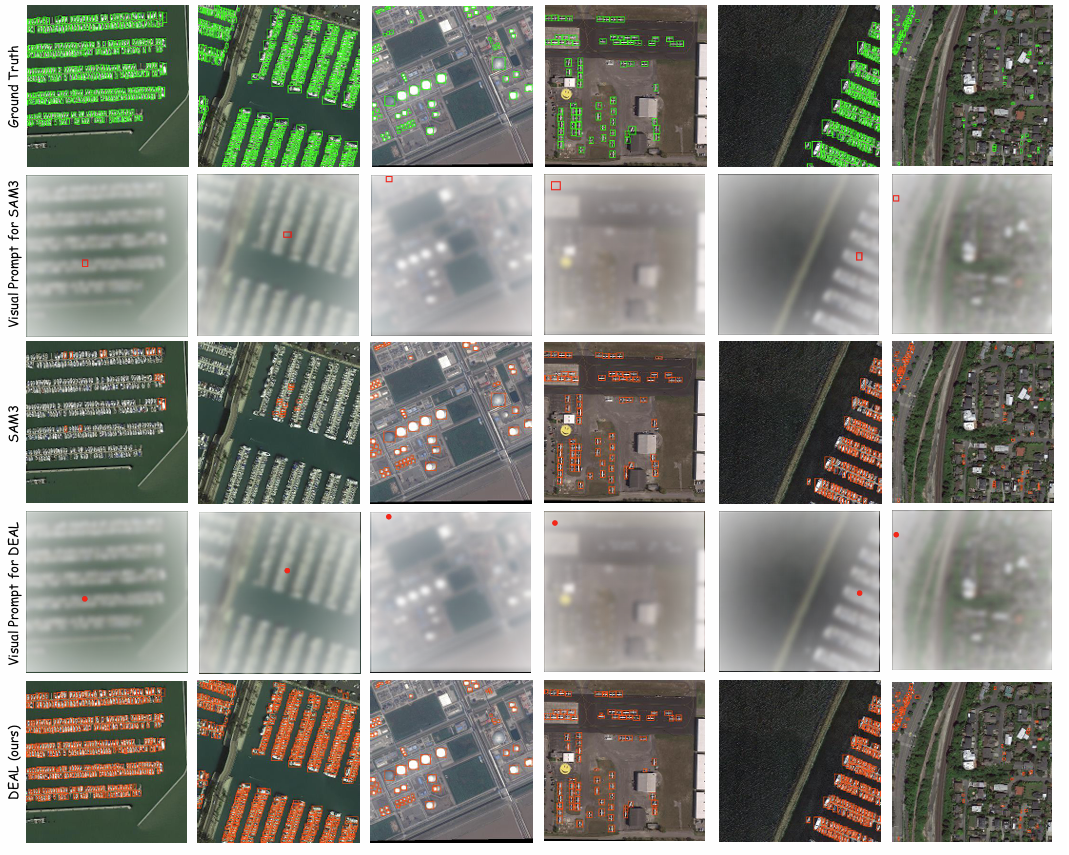
Figure 3. Detection results of zero-shot methods SAM3 and our proposed DEAL on DOTA-v2.0 dataset.
Green boxes, red boxes, red points, and orange boxes denote the gt, box visual prompts,
point visual prompts, and detection results, respectively.
|